L’antenne sur le trépied lors du 1er test de la platine, sans la pièce imprimée en 3D.
Il y a quelques temps j’ai fait l’acquisition d’une HF-PRO-2 PlusT de Komunica (https://www.passion-radio.fr/hf/hfpro2plust-1078.html). Cette antenne est très bien, j’ai été surpris de ses performances avec sa taille réduite et de la facilité pour l’accorder. Seulement, pour le portable, la mettre à l’arrière de mon IC-706 et bricoler des fils électriques en contrepoids n’était pas simple : pas facile de visser la PL259, l’antenne pivotait sans cesse car à cause des radians je ne pouvais pas visser à fond la PL…
Après avoir vu sur internet des kits tripod pour cette antenne, je me suis lancé dans la fabrication d’une fixation pour petit trépied photo acheté environ 20€, le Fotopro FY-583. Ce petit trépied fait moins de 30cm de long quand il est replié, environ 1m quand il est totalement déplié, et supporte jusqu’à 1kg de charge ce qui est suffisant pour les 425g de l’antenne.
Pour mettre l’antenne sur le support, j’ai fabriqué une platine de fixation à partir d’un bout d’aluminium de 1.5cm d’épaisseur qui traînait dans le garage. 2 pièces sont fixées sur cette platine :
Le connecteur UHF femelle – UHF femelle à montage sur parois,
Une pièce imprimée en 3D avec 5 inserts : 4 inserts M3 pour la fixation sur la platine en aluminium, et un insert 1/4″ pour la fixation sur la plaque avec vis 1/4″ qui sert normalement à fixer le support de téléphone ou un appareil photo sur le trépied.
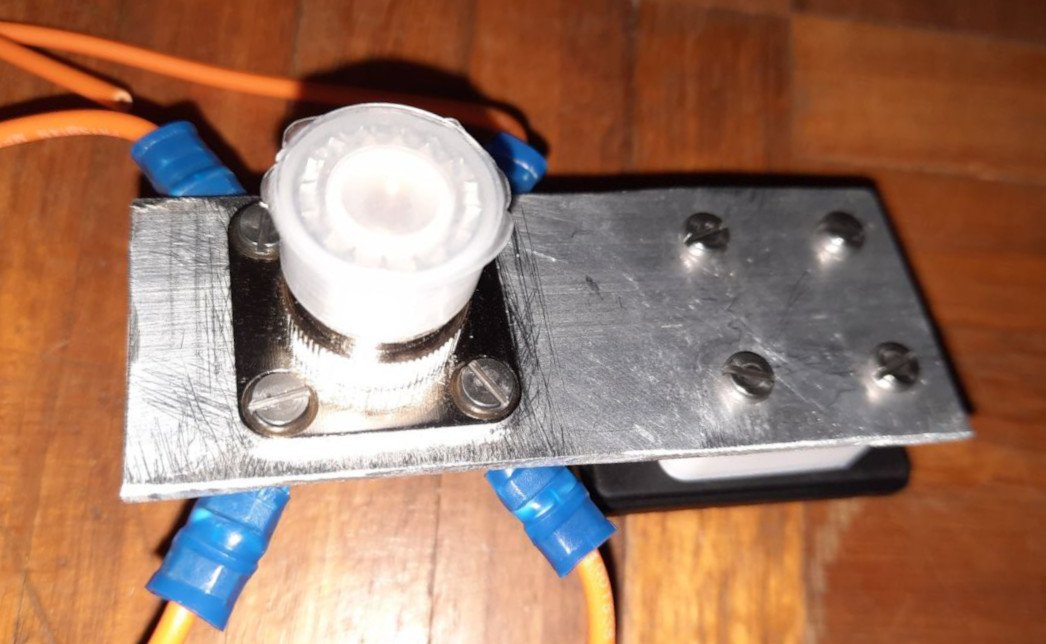
La platine en aluminum avec le connecteur UHF femelle – femelle à gauche et la pièce imprimée en 3D vissée sur le support du trépied à droite.
Les radians sont des fils électriques (4 fils de 3m de long pour le moment) de section 1mm² sertis sur des embouts à œillets et vissés avec les 4 vis de fixation de la SO239.
Le connecteur UHF à gauche avec les radians fixé grâce à ses vis à droite, sur la gauche la plaque support démontable du trépied photo qui permet de visser des accessoires grâce à une vis 1/4″.
Le trépied étant à l’origine un trépied photo, il est possible de démonter la plaque support qui comporte une vis 1/4″ grâce à un levier. Je peux donc laisser vissée ma platine sur la plaque support et l’emboîter puis la verrouiller sur le trépied au montage, ce qui prend beaucoup moins de place dans la mallette.
Le « kit » final : antenne + trépied + platine de fixation avec 4x3m de fil en contrepoids.
Le fichier STL et FreeCAD de la pièce imprimée en 3D est disponible ici.
La pièce imprimée avec les inserts montés.
Le montage final
Maintenant que le support est fait, je vais pouvoir utiliser plus confortablement cette antenne en portable. Ne reste qu'à éventuellement modifier la longueur des contrepoids, je verrai à l'usage.
Il y a quelques temps j’ai publié un article pour réaliser une station sol de réception du satellite UVSQ-SAT. Quelques mois plus tard, j’ai publié une version dédiée à la réception des satellites NOAA de cette même station sol. La version publiée aujourd’hui est une sorte de compilation de ces différentes stations.
Cette station a pour objectif de permettre la réception en automatique des émissions suivantes :
Télémétrie des cubesats utilisant les bandes amateurs VHF / UHF,
Transpondeurs audio des satellites (et de l’ISS),
SSTV PD120 de l’ISS,
APT des NOAA.
Après avoir reçu les signaux, la station est capable de :
Déposer les télémétries reçues sur la DB SatNOGS,
Déposer les télémétries reçues sur un serveur FTP,
Pousser les télémétries reçues via un serveur KISS,
Déposer les fichiers images ou audio générés sur un serveur FTP.
Cette station fonctionne aussi bien sur un ordinateur (Linux) que sur un Jetson Nano (2GB et 4GB). Cependant, la version pour ordinateur est limitée à une seule antenne (sauf si un module permettant d’accéder à des GPIO est installé) alors que la version Jetson Nano est fonctionelle avec 2 antennes. Dans ce cas, le choix de l’antenne adaptée est automatique grâce aux GPIO de la carte.
Le fonctionnement
Le fonctionnement logiciel de la station se résume au schéma qui suit :
Pour résumer :
La station sol lit la liste des satellites à suivre ainsi que leur fréquence et mode de réception,
Elle calcule les prochains passages de chaque satellite, puis attend le prochain passage,
Quand un satellite est en vue, elle active la réception et lance le script de démodulation du mode désiré,
A la fin du passage, les données reçues sont stockées, puis la station retourne à l’étape 1.
Installation des logiciels
Pour fonctionner, la station sol a besoin de sdr4space.light, GNU Radio et la librairie gr-satellites.
sdr4space.light
Pour installer sdr4space.light, il suffit de télécharger le .appImage pour votre plateforme depuis ce lien.
Je vous recommande de placer le .appImage dans le dossier software du dépôt git à télécharger plus loin.
Vous aurez sans doute besoin d’installer les dépendances suivantes :
Soapy-sdr 0.8
sudo apt-get install cmake g++ libpython3-dev python3-numpy swig
git clone https://github.com/pothosware/SoapySDR.git
cd SoapySDR
mkdir build && cd build
cmake ..
make -j4
sudo make install
sudo ldconfig
Une fois l’installation terminée, vous pouvez la tester avec :
SoapySDRUtil --info
La procédure d’installation est également disponible sur le wiki de SoapySDR.
Soapy rtlsdr
Pour utiliser SoapySDR avec une clé RTLSDR, il est nécessaire d’installer la librairie dédiée :
sudo apt-get install rtl-sdr librtlsdr-dev
git clone https://github.com/pothosware/SoapyRTLSDR.git
cd SoapyRTLSDR
mkdir build && cd build
cmake ..
make
sudo make install
En exécutant de nouveau la commande info pour SoapySDR vous devriez voir le support de la rtl-sdr dans la liste des modules trouvée par Soapy.
Si vous êtes sur Jetson Nano et que vous avez utilisé l’image disponible ici comme système d’exploitation, vous pouvez passer cette étape car GNU Radio 3.8 est déjà installé.
Pour appliquer cette correction à chaque démarrage du Linux, il suffit d’ajouter la commande précédente à la fin du fichier ./bashrc :
sudo nano ~./bashrc
Tous les logiciels nécessaires au bon fonctionnement de la station sont désormais installés.
Création du ramdisk
La station sol utilise une fifo pour envoyer le flux IQ de la clé SDR vers le GNU Radio de démodulation. Pour des questions de performance et pour éviter d’endommager la mémoire principale à cause des cycles de lecture / écriture, cette fifo est placée dans un ramdisk.
La fifo est créée automatiquement par sdr4space.light mais il faut cependant créer le ramdisk. Pour cela, il suffit d’ajouter une ligne à la fin du fichier /etc/fstab :
Cette ligne va créer un ramdisk de 128M à l’emplacement /opt/GS_ramdisk. Vous pouvez modifier cet emplacement si vous le souhaitez, il faudra juste penser à le modifier également dans le fichier de configuration général config.js.
Pensez à faire un reboot pour avoir apparaître le ramdisk.
Installation des scripts
Tous les scripts nécessaires au fonctionnement de la station sont disponibles sur mon Github. Pour les installer, il faut suffit de cloner le dépôt dans le dossier que vous aurez choisi :
Dans le dossier obtenu, vous trouverez un répertoire software. Ce répertoire contient tout le nécessaire :
Les scripts de démodulation GNU Radio dans GNU_Radio,
La liste des satellites et le fichier de configuration général dans config,
Les fichiers javascripts dans scripts-js,
Le fichier .sh permettant le lancement du bon GNU Radio en focntion du mode du satellite choisi.
Configuration de la station
Avant de commencer à utiliser la station, vous devez compléter les 2 fichiers présents dans le dossier config.
config.js
Ce fichier contient tous les différents paramètres utiles pour la station sol, à savoir :
Groupe Ground station configuration : permet de définir les coordonnées GPS de la station (en degrés décimaux) et son altitude (en mètres),
Groupe file path : permet de définir le lien vers les TLE (par défaut la station les TLE des satellites disponibles sur SatNOGS depuis Celestrak), l’emplacement du .sh permettant le lancement des GNU Radio (ne pas toucher si pas déplacé) et l’emplacement du ramdisk,
Groupe rtlsdr : permet de définir le gain à appliquer à la clé SDR,
Groupe print in terminal : permet d’afficher ou non dans le terminal les prochaines passes et le debug général,
Groupe upload config :
FTP : permet d’activer ou non l’envoi FTP à chaque fin de passage. Si FTP activé permet de définir les paramètres de connexion du serveur à utiliser,
SIDS : permet d’activer ou non l’envoi SIDS (pour les télémétries uniquement) et i activé permet de définir l’adresse du serveur et l’indicatif à utiliser pour l’envoi.
sat_list.txt
Ce fichier contient la liste des satellites que vous souhaitez suivre. Pour le remplir, il faut respecter la structure suivante :
NORAD;frequence;MODE
Saisissez une ligne par satellite, et faites attention à ne pas laisser de ligne vide à la fin du fichier.
NORAD : numéro NORAD du satellite,
frequence : fréquence à recevoir en Hz (par exemple 145.250e6 , e6 donnant des megas),
MODE : mode à recevoir du satellite. Sont disponibles :
NFM : réception FM bande étroite,
TM : télémétrie du satellite. Si le satellite existe sur SatNOGS le choix de la modulation sera fait automatique par GNU Radio,
APT : réception des images APT des satellites météo NOAA15, NOAA18 et NOAA19,
PD120 : réception des images SSTV PD120 transmises par l’ISS.
Lancer la station sol
Le lancement de la station sol se fait depuis un terminal. Ouvrez en donc un dans le dossier où se trouve le .appImage de sdr4space.light (je vous recommande de placer le .appImage dans le dossier software du git). Si le .appImage est à l’emplacement recommandé, lancez la commande suivante :
./sdr4space_lite_x86_64.AppImage -d scripts-js/
Si le .appImage est un dossier différent, pensez à adapter les chemins vers le .appImage et vers le dossier scripts-js du git.
Une fois la commande exécutée, vous devriez avoir l’affichage suivant dans le terminal (si vous avez laissé sur true les différents debug) :
Vous n’avez ensuite plus qu’à attendre un passage de satellite ! Vous trouverez les résultats des passages dans un dossier results qui sera créé dans le répertoire software du git.
Cet article concerne la partie logicielle de station, un autre article lui dédié à la partie matérielle pour une utilisation avec le Jetson Nano sera mis en ligne prochainement.
Cette station sol utilisant les logiciels sdr4space.light, GNURadio Companion et aptdec permet de recevoir et décoder les images transmises par les 3 satellites NOAA actifs en APT : NOAA 15, NOAA 18 et NOAA 19.
La station sol présentée ici est basée sur celle présentée pour UVSQ-SAT (et disponible ici), les seuls changements apportés pour la réception des images satellites sont logicielles (et changement des filtres si il y en a).
Une vidéo de présentation (présentation lors du salon SudExpo Radio 2021 dans le Vaucluse le 24/10/2021) est également disponible :
Le diaporama de la présentation est également en ligne :
Le fonctionnement de la station peut être résumé par le graphique suivant :
Schéma de fonctionnement logiciel de la station pour la réception d’images APT.
Le principe de fonctionnement de cette version de la station est donc assez similaire de la verison pour UVSQ-SAT détaillée ici :
Le logiciel sdr4space.light s’occupe de prédire les passages des 3 satellites NOAA actifs en APT et attend les passages,
Pour chaque passage, sdr4space.light calcule l’effet Doppler au cours de la passe, le corrige et enregistre un flux IQ à 48 KHz,
Après chaque passage, GNU Radio Companion effectue une démodulation FM bande large pour générer un fichier .wav toujours à 48 KHz,
Le logiciel aptdec décode le .wav pour générer l’image reçue lors du passage.
Installation des logiciels
Pour installer les logiciels sur le Jetson Nano (sauf aptdec), je vous invite à consulter mon article les logiciels de la station sol pour UVSQ-SAT disponible ici. La seule différence est que pour cette version de la station nous n’avons pas besoin de la librairie gr-satellites.
Pour Installer apt-dec :
L’installation d’aptdec est simple, il suffit de suivre les commandes suivantes (commandes présentes sur le git dédié) :
git clone https://github.com/Xerbo/aptdec.git && cd aptdec
mkdir build && cd build
cmake -DCMAKE_BUILD_TYPE=Release ..
make
Configuration des logiciels
Une fois que tout est installé, il suffit de télécharger les fichiers disponibles sur mon git dédié et de les placer dans le dossier voulu.
gnuradio/decodeur_NOAA_WAV.py : Fichier python généré par GNU Radio effectuant la démodulation FM large bande et générant le fichier .wav. Vous pouvez au besoin éditer les liens vers les fichiers appelés,
gnuradio/decodeur_NOAA_v2.grc : Fichier GNU Radio effectuant la démodulation FM large bande et générant le fichier .wav. Vous pouvez au besoin modifier les liens vers les différents fichiers appelés et modifier les noms,
gnuradio/launch_convert_image.sh : contient les appels vers le fichier python généré par GNU Radio et pour décoder le fichier .wav avec aptdec. Pensez à modifier les liens vers les fichiers pour utiliser le script.
boot.js : Fichier de boot de sdr4space.light à lancer. Toutes les opérations contenues dans les différents scripts js se lanceront ensuite automatiquement,
config.js : fichier contenant les différentes variables à mettre à jour avant de lancer sdr4space.light. Pensez donc à mettre à jour les différents liens vers les fichiers, vos coordonnées GPS, le gain de la clé SDR etc etc…
last_record.ini : ce fichier est généré automatique par sdr4space.light et contient l’horodatage du dernier fichier cf32 effectué,
stream.js : permet d’enregistrer le passage satellite en cours dans un fichier .cf32. Rien n’est à modifier dans ce script,
tracking.js : permet la prédiction des futures passages pour tous les satellites et le tracking lors de passage. Rien n’est à modifier dans ce fichier.
Utilisation de la station
Une fois que tout est configuré, il suffit de lancer la commande suivante dans le répertoire de sdr4space.light et des fichiers téléchargés sur mon git :
./sdr4space_lite_x86_64.AppImage -f boot.js
Après un passage de satellite, vous devriez avoir un fichier .png contenant l’image reçue en noir et blanc :
Partie software de la station sol SDR pour UVSQ-SAT dont l’hardware a été présenté dans cet article.
Fonctionnement général
La station sol n’utilise que 2 logiciels pour fonctionner :
SDR4space.lite (site officiel) : téléchargement des TLE, prédiction des passages, correction Doppler, enregistrement des passages
GNU Radio Companion (site officiel) : décodage des trames depuis le fichier IQ, écriture des trames dans un fichier .txt, envoi des trames vers la DB de satnogs
Les 2 logiciels utilisés sont gratuits (GNU Radio est open source et gratuit, SDR4space.lite est la version gratuite de SDR4space).
Préparation de la carteSD pour le Jetson nano
La toute première étape est de flasher la carteSD pour le Jetson nano. Pour cela, il suffit de suivre la procédure expliquée sur le site de Nvidia :
Les scripts SDR4space et GNU Radio sont à télécharger depuis ce lien.
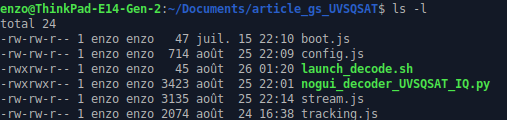
Il suffit ensuite de placer les fichiers Javascript .js, le fichier Python .py et le bash .shd dans un même dossier comme dans la capture ci-dessous.
Pensez à rendre exécutable le fichier bash launch_decode.sh avec la commande :
sudo chmod u+x /chemin/vers/launch_decode.sh
SDR4space.lite
La station sol utilise la version gratuite du logiciel SDR4.space afin de prédire les passages du satellite au dessus de la station, de compenser l’effet Doppler au cours des passes, d’enregistrer les passages et lancer le décodage.
Téléchargement
Pour télécharger SDR4space.lite, il suffit de se rendre ici et de choisir la version pour Jetson nano (ou la version classique si vous êtes sur PC).
Une fois votre exécutable téléchargé, placez le dans le répertoire que vous voulez (le même répertoire que les scripts ou autre, au choix).
Pré-requis
SoapySDR
Pour utiliser SDR4space vous devez installer SoapySDR sur le jetson nano. Pour cela, suivez les commandes suivantes (la procédure est également disponible ici) :
Différentes variables sont à modifier dans le fichier config.js pour adapter le script à votre station sol :
gs_latitude et gs_longitude : les coordonnées GPS en degrés décimaux de la station,
gs_asl : l’altitude de la station,
tle_path : par défaut télécharge les TLE de Celestrak, mais possibilité de pointer vers un autre lien ou un fichier en local,
path_cmd_file : chemin absolu vers le fichier launch_decode.sh
rtl_gain : Gain de la clé RTL-SDR
print_passes et print_debug : permet d’afficher ou non dans le terminal les prochains passages et les messages de debug
Lancement
Vous pouvez ensuite lancer SDR4space.lite avec le script de la station sol avec la commande (commande pour le Jetson nano, à adapter si vous êtes sur PC) suivante :
Sur PC le logiciel étant dans un .appImage vous ne devriez pas avoir d’erreur. Sur Jetson nano, vous pouvez cependant avoir des erreurs pour des packages manquants. Si c’est le cas, installez les packages indiqués dans les erreurs.
Si tout se passe bien, vous devriez avoir un résultat comme celui-ci :
Tant que cette commande est en cours d’exécution le Jetson nano fera le tracking du satellite, enregistrera les passages et décodera les trames.
GNU Radio Companion
Le décodage des trames se fait avec un script GNU Radio Companion 3.8. Pour l’installer il faut compiler ses sources sur le Jetson nano (procédure disponible ici):
Le script de décodage pour GNU Radio est le fichier .py (au besoin le .grc est également disponible). Quelques modifications sont à apporter dans le fichier nogui_decoder_UVSQSAT_IQ.py pour l’adapter à la station:
Ligne 40 : un fichier start_time.ini sera généré par SDR4space dans le fichier des scripts. Il faut donc saisir le chemin absolu jusqu’au dossier des scripts pour que GNU Radio trouve par la suite le fichier start_time.ini
Ligne 50 : vous devez saisir votre indicatif pour SatNOG ainsi que les coordonnées GPS de la station en degrés décimaux.
La station sol va maintenant enregistrer les passages du satellite et les décoder avec le GNU Radio. A chaque fois, le fichier grc_out.txt sera écrasé, si vous voulez conserver les données en local sur votre Jetson il vous faut donc faire un script qui renomme ce fichier texte.
Seul l'envoi vers Satnogs est actif pour le moment, mais vous pouvez envoyer les données vers d'autres serveurs SIDS en éditant le .grc et en le recompilant avec GNU Radio.
La station sol décrite ci-dessous permet la réception du nanosatellite 1U conçu par le LATMOS : UVSQ-SAT. L’antenne permettant la réception est réalisable à partir de l’article en ligne ici.
Les informations concernant la partie logicielle de la station sont disponibles ici.
Vue de l’intérieur de la station sol
Présentation rapide
La station est articulée autour d’un GPU et est utilisable directement avec une prise 230V et un câble RJ45. Grâce à une clé RTL-SDR, elle va numériser le spectre radio pour enregistrer les différents passages du satellites et décoder ses données.
Un envoi des données vers des serveurs comme SatNOGS est possible.
La station est autonome pour le calcul des passages ainsi que pour le tracking, il suffit donc de la déployer puis de l’oublier.
Liste du matériel
Type
Description
Lien
Prix
GPU
NVIDIA Jetson Nano 2GB / 4GB
Version 2GB : https://fr.rs-online.com/web/p/modules-de-developpement-pour-processeurs/2049968/
Version 4GB : https://fr.rs-online.com/web/p/modules-de-developpement-pour-processeurs/1999831/
265€ (sans le filtre, les fils électriques, le connecteur RJ45, les entretoises, les vis et le câble RJ45)
Montage de la station sol
Le montage est assez simple, mais voici un résumé des différentes opérations :
Percer les trous pour la prise IEC, le connecteur RJ45 et le connecteur N sur un des côté du boitier,
Percer les trous pour la fixation de l’alimentation et du Jetson nano sur le fond du boitier (penser à insérer la SD flashée dans le Jetson avant de le fixer),
Placer la prise IEC, le connecteur RJ45 et le connecteur N dans leurs emplacements respectifs,
Fixer l’alimentation et le Jetson sur le fond du boitier avec des vis et entretoises,
Câbler le 5V entre la sortie de l’alimentation à découpage et l’alimentation du Jetson (ATTENTION : l’alimentation de la version 4GB du Jetson nano peut se faire via un jack 5,5 x 2,5mm ou via un connecteur Micro-USB alors que pour la version 2GB elle se fait forcément via un connecteur USB-C)
Connecter le SMA male du connecteur N -> SMA sur le RF IN du LNA,
Relier le RF OUT du LNA au filtre via le SMA femelle – femelle fournit avec le LNA,
relier le filtre à la clé SDR via le câble SMA-SMA de 30cm,
câble l’alimentation du LNA sur la sortie 5V de l’alimentation à découpage en pensant à désactiver le Bias-T grâce au jumper sur le PCB,
Connecter le jetson nano en RJ45 (ou wifi si vous voulez utiliser le wifi),
câble l’entrée 230V de l’alimentation à découpage en passant par le fusible du connecteur IEC.
La station est assez simple au niveau du matériel et est peu onéreuse étant donné qu'il est possible de la mettre en place avec un budget d'environ 250€ dans sa version 4GB de RAM, antenne comprise.
Fabrication d’une antenne QFH pour la réception du satellite UVSQ-SAT (437.020 MHz). L’antenne a été conçue avec Clément DIAS du LATMOS.
L’antenne QFH une fois terminée
Le matériel nécessaire
L’antenne se fabrique à partir d’éléments faciles à sourcer dans des magasins de bricolage et sur internet :
Les 4 pièces à imprimer,
Du fil électrique de diamètre 1,5mm² (il est possible d’utiliser un autre diamètre de fil, mais les pièces imprimées risquent de ne plus être adaptées et il faudra porter plus d’attention à la taille de l’antenne),
La première étape consiste à coller les pièces imprimées sur le tube IRO. Les pièces doivent être collées (dans un 1er temps ne pas les coller, pour pouvoir les bouger légèrement en surveillant avec un VNA) de manière à obtenir les espacements suivants :
L’antenne avec la structure plastique seule a cette apparence :
Les boucles de conducteur
La QFH est constituée de 2 boucles de conducteur. La boucle la plus courte mesure 705mm, la boucle la plus longue mesure elle 741mm.
Pour la fabrication de l’antenne, je vous conseille de couper les boucles en plusieurs morceaux : les traversées du bas (en bleu sur la photo), les spirales (en vert) et les traversées du haut (en rouge).
Les différentes sous parties de la QFH
Le montage est à faire comme suit :
Passer les 4 morceaux de fils pour former les 4 morceaux de spirale (en vert sur la photo ci-dessus),
Passer les 2 morceaux de fils pour former les 2 traversées du bas (en bleu sur la photo ci-dessus),
Braser les jonctions entre les traversées du bas et les spirales,
Passer les 2 morceaux de fils pour former les 2 traversées du haut (en rouge sur la photo ci-dessus),
Braser les jonctions entre les traversées du haut et les sprirales.
Une fois toutes les brasures effectuées, il suffit de couper les traversées du haut pour pouvoir connecter le câble coaxial comme sur la photo ci-dessous :
Connexion des 2 brins au coaxial
Vous pouvez ensuite mettre l’embase N au pied du tube IRO (je n’ai pas publié de pièce 3D dédiée à l’embase car il existe de nombreux modèles différents).
Tailler l’antenne au VNA
En théorie l’antenne doit être un peu trop basse en fréquence. Dans ce cas, recouper les brins au niveau des brasures sur le coaxial pour faire remonter la fréquence de résonance de l’antenne.
Au besoin, vous pouvez également jouer sur l »espacement entre les pièces supérieure et inférieure de la structure.
Dans mon cas, après une première coupe rapide, voici le résultat obtenu :
Le ROS de l’antenne au NanoVNA entre 400 et 460 MHz.
Le return loss au NanoVNA entre 400 et 460 MHz.
Avec un ROS d’environ 1.6, un return loss de -13dB et un pic aux environs de 440.5 MHz, mon antenne est légèrement trop haute en fréquence. Il me faut donc jouer un petit peu sur l’espacement entre les pièces de la structure et/ou sur les brasures de connexion au coaxial pour la rebaisser sur 437MHz. En fonction de la réception obtenue avec, je prendrai ou non le temps de le faire.
Cette antenne a pour but d"aider à la réception d'UVSQ-SAT, le cubesat du LATMOS. Elle a donc été développée avec les équipes du LATMOS. Le reste de la chaine de réception est disponible ici.
Cet article permet d »installer le nécessaire pour utiliser les clé rtlsdr avec GNU Radio Companion. Pour installer GNU Radio, voir cet article.
Pour utiliser une clé rtlsdr, la « librairie » nécessaire est la librairie gr-osmosdr. La procédure d »installation est également disponible ici.
git clone git://git.osmocom.org/gr-osmosdr
cd gr-osmosdr/
git checkout gr3.8
mkdir build
cd build/
cmake ../
make
sudo make install
sudo ldconfig
La commande « git checkout gr3.8 » permet de « charger » la version de gr-osmosdr pour GNU Radio 3.8. Si vous avez GNU Radio 3.9, pas besoin de l’exécuter. Si vous avez GNU Radio 3.7, remplacer gr3.8 par gr3.7.
Une fois l »installation terminée, en lançant GNU Radio vous devriez voir dans la liste des modules une rubrique OsmoSDR :
Il est maintenant temps de temps l »installation. Créez un programme simple de test comme celui ci-dessous :
Programme affichant le spectre de la clé SDR à 100 MHz
Si tout se passe bien, le spectre doit s »afficher :
Si GNURadio vous indique « No module named osmosdr », il y a 2 solutions :
Avant d »exécuter gnuradio-companion dans le terminal, tapez la commande suivante : export PYTHONPATH=$PYTHONPATH:/usr/local/lib/python3/dist-packages
Ou si vous ne voulez pas tapez cette commande à chaque fois, mettez la à la fin du fichier .profile en l »ouvrant avec nano :
Une fois le fichier téléchargé, tapez les commandes suivantes dans un terminal :
cd répertoire-du-fichier/
gunzip < wxtoimg-linux64-2.10.11-1.tar.gz | sudo sh -c « (cd /; tar -xvf -) »
Une fois que l »ordinateur a fini de travailler (cela ne devrait prendre que quelques secondes), vous pouvez taper la commande suivante pour lancer WXtoImg :
wxtoimg -G
Si tout s »est bien passé, vous devriez voir WXtoImg à l »écran.
Pour la configuration de WXtoImg, je vous laisse consulter l »article pour Windows car le fonctionnement du logiciel ne varie pas entre les 2 OS.
Pour la partie audio du logiciel, vous devrez gérer l »entrée carte son avec PulseAudio ou Pavucontrol.
Lancez à chaque fois WXtoImg avec la commande suivante :
padsp — xwxtoimg
Dans la configuration de WXtoImg, choisissez /dev/sdp comme carte son, et gérer la sortie du client SDR et l »entrée de WXtoImg avec Pulseaudio ou équivalent.
La version V4.1 n’apporte pas de changements majeurs par rapport à la V4. Les seuls changements concernent le PCB qui est désormais double face et designé avec KiCAD. Une modification mineure a également été apportée sur le filtrage de l »audio.
Le fonctionnement est le même que le tracker V4, je vous invite donc à consulter son article pour les différents fonctions.
Le document pour l’assemblage est disponible ici :
SatNOGS est un réseau de station sol pour l’écoute des satellites utilisant les bandes radioamateurs. Vous trouverez plus d’informations sur le site officiel de SatNOGS : https://satnogs.org
Cet article explique comment mettre en place une station SatNOGS simple (Raspberry + clé SDR + antenne omnidirectionnelle).
Dans mon cas, l’antenne est le dipôle en V pour 137MHz décrit ici.
Installation de l’image
Pour mettre le Raspberry de réception satellite, il faut installer l’image de SatNOGS sur la carte SD. Pour cela, téléchargez l’image disponible ici et flashez la SD avec. Une fois la SD prête, vous pouvez la remettre dans le Raspberry et mettre sous tension ce dernier.
L’image est un raspbian lite (donc sans interface graphique) avec les programmes nécessaires au fonctionnement de la station satnogs, une fois le Raspberry démarré vous devriez donc avoir le terminal Raspbian traditionnel.
Pour réaliser ce qui suit vous devez avoir préalablement créé un compte sur SatNOGS et avoir ajouté une station sur https://network.satnogs.org.
Commencez par changer le mot de passe du raspberry, passez le en français, changer le fuseau horaire, son clavier… puis mettez le à jour avec les commandes sudo apt-get habituelles :
sudo apt-get update
sudo apt-get upgrade
Une fois les mises à jour terminées, lancez l’interface de paramétrage de SatNOGS :
sudo satnogs-setup
Dans cette interface, rendez-vous dans la rubrique Basic Configuration. Remplissez les paramètres comme suit :
SATNOGS_API_TOKEN : la clé d’API de votre compte. Pour la trouver, rendez-vous sur https://network.satnogs.org, cliquez sur votre icône en haut à droite puis Dashboard -> API Key
SATNOGS_SOAPY_RX_DEVICE : le type de récepteur SDR utilisé. Si vous utilisez une clé RTL-SDR classique mettez driver=rtlsdr
SATNOGS_ANTENNA : Si vous récepteur ne comporte qu’un seul connecteur d’antenne (clé SDR standard), saisissez RX
SATNOGS_RX_SAMP_RATE : fréquence d’échantillonnage du récepteur. Pour un récepteur classique saisissez 2.048e6 (2,048M)
SATNOGS_RF_GAIN : gain en réception du récepteur. SatNOGS conseille de saisir 32.8 | Le gain se configure dans le menu des réglages Advanced -> radio
SATNOGS_STATION_ELEVATION : L’élévation de votre station par rapport au niveau de la mer en mètres
SATNOGS_STATION_ID : L’ID de votre station. Vous le trouvez sur votre dashboard
SATNOGS_STATION_LAT : Latitude de votre station en degrés décimaux (Nord positif)
SATNOGS_STATION_LON : Longitude de votre station en degrés décimaux (Est positif)
Dans la rubrique advanced -> radio, vous pouvez saisir la correction sur votre récepteur en ppm en remplissant le champs SATNOGS_PPM_ERROR
Une fois tous ces paramètres saisis vous n’avez plus qu’à retourner sur le menu principal de satnogs-setup et à appliquer les changements. Normalement au bout de quelques minutes vous devriez passer en statut « online » la station sur votre dashboard.
Si ce n’est pas le cas vérifiez qu’il n’y ai pas d’erreur avec les commandes suivantes :